自從機械錶發明以來,穩定的把動力提供給擺輪,產生均等且精確的時間,一直是製錶師所追求的最高目標,其中擒縱裝置就是肩負起這項重責大任的要角。擒縱裝置接受秒輪傳遞過來的動能,並且劃分為規律的能量,同時藉由游絲的反作用力,再次推動擒縱輪、檔桿或馬仔,這兩個力量交互的作用,擒縱裝置方得以穩定的運轉。由於擒縱裝置運作的次數是機械錶中,數量最頻繁的零件,因此耐用性是重要的考量之一,另外就是要降低零件之間的摩擦力。歷經五百年來製錶師們的努力,現今的擒縱裝置已經有了高度的耐用性與精確度,如果保養得宜,用上五十年也是輕而易舉的事。以下我們將簡述擒縱裝置的類型與特點,並且解說現在常用的瑞士槓桿擒縱裝置,仔細分析其運作原理。
擒縱裝置的種類
一般來說擒縱裝置分為三大,衍生出的類型可高達數十種,我們針對這三大類型,簡單的說明其運作原理與種類。
一、返回擒縱結構(Recoil escapements):
擒縱輪在擺輪完成擺弧時,會被迫回轉移動一小段距離,然後再往前移動。 種類:冠狀輪擒縱裝置、錨形擒縱裝置(用於鐘的擒縱裝置)。
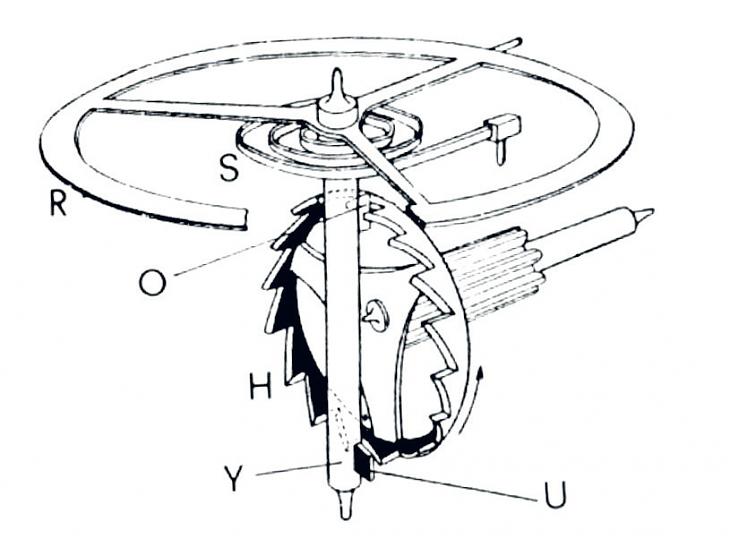
▲冠狀輪擒縱裝置(Spindle escapement)
從左圖我們可以看到,右側成垂直狀態的擒縱輪(H)以逆時針方向移動,當齒尖撥動上方的擺輪軸心撥片(O),擺輪(R)開始朝逆時針擺動;下方的擺輪軸心撥片(U)也以逆時針方向移動,但隨即被擒縱輪齒尖撥動,又驅動擺輪朝順時針方向移動,兩者一來一往,形成穩定的震盪頻率,這是最早用於懷錶的擒縱裝置。由於擺輪與游絲(S)的回彈力量尚未完成時,擒縱輪齒尖就開始撥動另一個撥片,因此擒縱輪會受到擺輪與遊絲的力量介入,產生短暫的回轉現象。
從左圖我們可以看到,右側成垂直狀態的擒縱輪(H)以逆時針方向移動,當齒尖撥動上方的擺輪軸心撥片(O),擺輪(R)開始朝逆時針擺動;下方的擺輪軸心撥片(U)也以逆時針方向移動,但隨即被擒縱輪齒尖撥動,又驅動擺輪朝順時針方向移動,兩者一來一往,形成穩定的震盪頻率,這是最早用於懷錶的擒縱裝置。由於擺輪與游絲(S)的回彈力量尚未完成時,擒縱輪齒尖就開始撥動另一個撥片,因此擒縱輪會受到擺輪與遊絲的力量介入,產生短暫的回轉現象。
二、 靜止擒縱結構(Frictional restescapements ):
▲具備靜止功能。擒縱輪於擺輪完成擺弧時,始終會保持一輪齒尖端靜止在擺輪軸心或卡子上,由於齒尖始終與擺輪軸心接觸摩擦,耐用性不佳。種類:工字輪擒縱裝置、兩合擒縱裝置、中國雙擒縱裝置。
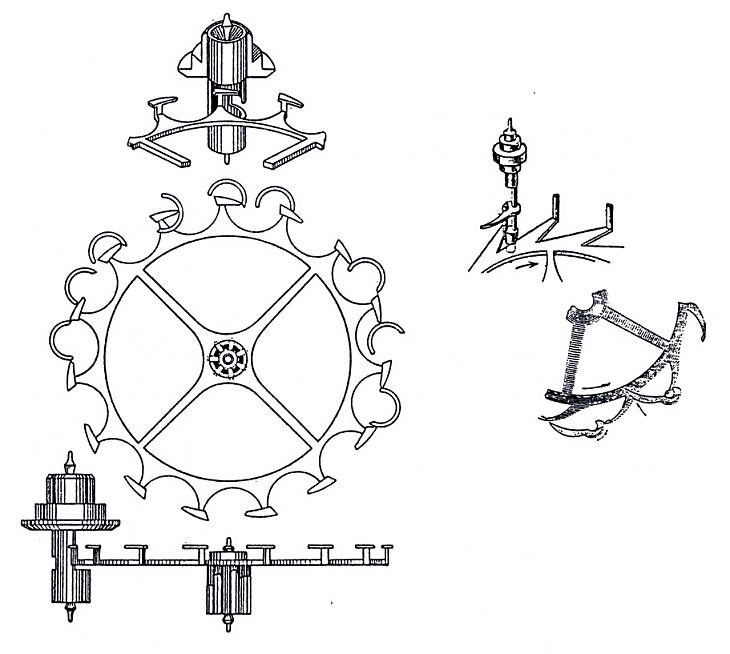
▲工字輪擒縱裝置(Cylinder escapement)
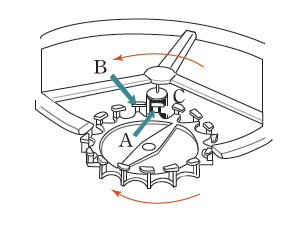
由於靜止擒縱結構所需的空間較小,因此開始取代冠狀輪擒縱裝置。從圖片我們可以看到,工字輪的齒尖向上突起,且呈工字形;而擺輪軸心的套筒(C),可容納擒縱輪齒尖進入。當擒縱輪(A)順時針轉動時,齒尖進入套筒的力量會迫使套筒朝逆時針方向移動,之後擺輪(B)受到游絲回彈的力量,以順時針迴轉,這時齒尖就會脫離套筒。同時下個齒尖就會接觸套筒外圍,繼續驅動套筒移動,如此一內一外的交互驅動,每個齒尖都會接觸套筒內外各一次,使擺輪不斷的轉動運行。
由於靜止擒縱結構所需的空間較小,因此開始取代冠狀輪擒縱裝置。從圖片我們可以看到,工字輪的齒尖向上突起,且呈工字形;而擺輪軸心的套筒(C),可容納擒縱輪齒尖進入。當擒縱輪(A)順時針轉動時,齒尖進入套筒的力量會迫使套筒朝逆時針方向移動,之後擺輪(B)受到游絲回彈的力量,以順時針迴轉,這時齒尖就會脫離套筒。同時下個齒尖就會接觸套筒外圍,繼續驅動套筒移動,如此一內一外的交互驅動,每個齒尖都會接觸套筒內外各一次,使擺輪不斷的轉動運行。
三、自由擒縱結構(Detached escapements ):
擺輪與擒縱裝置在動力傳輸之後完全分開,擺輪能自由擺動且不與擒縱裝置接觸;而擺輪與擒縱輪系間的接觸與摩擦時間越短,擺輪受它的影響也越少,精準度也隨之提高。種類:槓桿擒縱裝置、天文台擒縱裝置、寶璣自由擒縱裝置。
▲1. 寶璣自由擒縱裝置(Echappement natural)
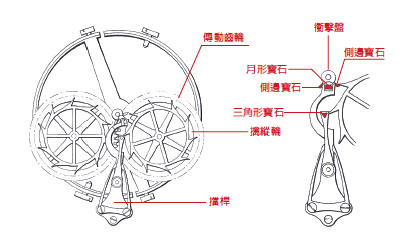
當年寶璣大師發明且改良了多種擒縱裝置,其中以這個寶璣自由擒縱裝置最為特殊,且影響後人最多。它採用兩個同軸擒縱輪,上方為擒縱輪,下方為傳動齒輪(秒輪只連接其中一個傳動輪)。在擺輪的中央處,有一個撥動擋桿,當擋桿被衝擊盤上的月型寶石撥動時,擋桿中央的三角形寶石也同時移動,解開鎖定的擒縱輪,此時兩個同軸擒縱輪會嚙合轉動,此時其中一個擒縱輪會撥動衝擊盤外側的寶石,繼續傳遞能量,等到擺輪回彈時,月型寶石再次撥動擋桿,再次使兩個同軸擒縱輪嚙合轉動,接著擒縱輪會衝擊盤外側的另一個寶石,完成下一個循環。雖然這是兩百年前的設計,但是在這幾年,有新的擒縱裝置運用此一原理,這部分下一期技術講座我們會提到。
當年寶璣大師發明且改良了多種擒縱裝置,其中以這個寶璣自由擒縱裝置最為特殊,且影響後人最多。它採用兩個同軸擒縱輪,上方為擒縱輪,下方為傳動齒輪(秒輪只連接其中一個傳動輪)。在擺輪的中央處,有一個撥動擋桿,當擋桿被衝擊盤上的月型寶石撥動時,擋桿中央的三角形寶石也同時移動,解開鎖定的擒縱輪,此時兩個同軸擒縱輪會嚙合轉動,此時其中一個擒縱輪會撥動衝擊盤外側的寶石,繼續傳遞能量,等到擺輪回彈時,月型寶石再次撥動擋桿,再次使兩個同軸擒縱輪嚙合轉動,接著擒縱輪會衝擊盤外側的另一個寶石,完成下一個循環。雖然這是兩百年前的設計,但是在這幾年,有新的擒縱裝置運用此一原理,這部分下一期技術講座我們會提到。
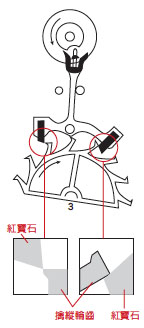
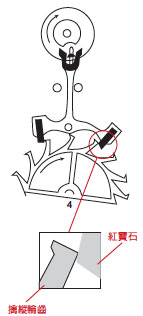
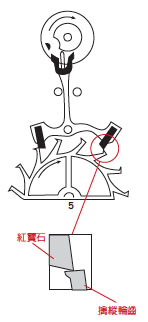
▲2. 天文台擒縱裝置(Chronometer escapement)
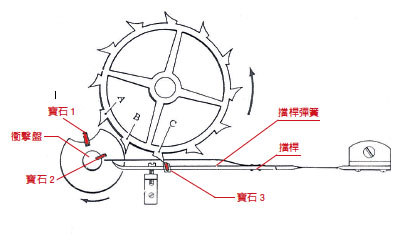
與瑞士槓桿擒縱裝置同屬於自由擒縱結構,由天文台擒縱裝置的字面來看,大概就猜得到它是屬於十分精確的裝置,時常用於參加天文台競賽的錶款。它的結構由擒縱輪、衝擊盤與擋桿所組成。當擒縱輪齒尖傳遞能量(此時,寶石3已經短暫的解開擒縱輪)至衝擊盤外側的寶石1,擺輪就會順時針的擺動,同時擒縱輪會被擋桿上的寶石3 阻擋。等到擺輪回轉(逆時針)時,衝擊盤內側的寶石2 會來、回撥動擋桿上的彈簧各一次,當第二次回撥彈簧時,擋桿上的寶石3 會移動,解開鎖定擒縱輪,同時間擒縱輪齒尖又開始衝擊外側的寶石,擺輪又開始循環擺動,這樣就完成了一個循環。與瑞士槓桿擒縱裝置不同之處,是天文台擒縱只有一次的衝擊過程,所以摩擦少;但缺點是在晃動的環境裡,效果明顯會受到影響。所以腕錶開始普及後,這款擒縱裝置已漸漸消失了。
與瑞士槓桿擒縱裝置同屬於自由擒縱結構,由天文台擒縱裝置的字面來看,大概就猜得到它是屬於十分精確的裝置,時常用於參加天文台競賽的錶款。它的結構由擒縱輪、衝擊盤與擋桿所組成。當擒縱輪齒尖傳遞能量(此時,寶石3已經短暫的解開擒縱輪)至衝擊盤外側的寶石1,擺輪就會順時針的擺動,同時擒縱輪會被擋桿上的寶石3 阻擋。等到擺輪回轉(逆時針)時,衝擊盤內側的寶石2 會來、回撥動擋桿上的彈簧各一次,當第二次回撥彈簧時,擋桿上的寶石3 會移動,解開鎖定擒縱輪,同時間擒縱輪齒尖又開始衝擊外側的寶石,擺輪又開始循環擺動,這樣就完成了一個循環。與瑞士槓桿擒縱裝置不同之處,是天文台擒縱只有一次的衝擊過程,所以摩擦少;但缺點是在晃動的環境裡,效果明顯會受到影響。所以腕錶開始普及後,這款擒縱裝置已漸漸消失了。
3. 瑞士槓桿擒縱裝置(Swiss lever escapement)
早在1759 年湯瑪斯.穆奇(Thomas Mudge)發明了槓桿擒縱裝置,這款設計優良的擒縱結構,經過不斷的改良後,已成為目前最主要的擒縱裝置。其中後人最重要的改革,就屬Georges Auguste Leschot 在1825 年所研發的瑞士槓桿擒縱裝置,他利用改變擒縱輪齒與馬仔(擒縱叉)兩端接觸面的形狀,讓發條的力量驅使馬仔進入同樣的位置,並且推動擺輪,同時也需要相同的力量來推動馬仔。因此可確保每一次的運轉過程,移動的位置與消耗的動能都完全一樣,這就是瑞士槓桿擒縱裝置百年來稱霸於錶壇的原因。目前市面上雖然推出的多種新款擒縱裝置,但瑞士槓桿擒縱裝置仍占有九成九以上的市場,短期間恐怕難以撼動其地位。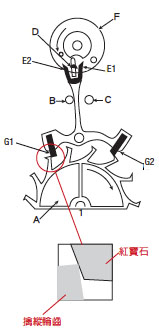
▲固定於擺輪軸心上的衝擊盤F,有嵌入一個月型寶石D,當游絲的反作用力推動D 去撞擊馬角E1 時,整個馬仔會向右擺。而寶石G1 向上移動。
▲當G1 向上移動時,原本鎖定擒縱輪的力量也消失,因此使擒縱輪順時針移動,同時齒尖表面滑過寶石G1, 推動馬仔向持續右移動。此時馬角E2順著力量去推動月型寶石D,使得擺輪游絲,又再次獲得發條傳遞過來的能量。
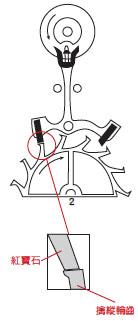
▲由於馬仔向右依靠在定位樁C上,而且擒縱輪齒尖緊靠在寶石G2 側面,所以使擒縱輪停止運轉並鎖定不動。月型寶石D 脫離了兩側的馬角的接觸,開始逆時針的運轉。
▲當月型寶石D 隨著擺輪逆時針轉到底(約225 度至315 度),游絲的反彈力量,將月型寶石D 順時針推回兩個馬角E1 與E2 之間, 首先月型寶石D 先撞擊馬角E2, 馬仔開始向左擺,寶石G2 也開始向上移動,擒縱輪齒尖也開始滑動。
▲馬仔向左移動, 因此擒縱輪齒尖滑過寶石G2, 同時擒縱輪也開始移動,推動馬仔向左靠,而馬角E1 順著力量去推動月型寶石D,朝順時針方向轉動。此時寶石G1 往下移動,讓擒縱輪停止轉動,完成了一個循環。